ROAMS (Rover Analysis, Modeling and Simulation)
is a physics based simulation tool for the analysis, design,
development, test and operation of rovers for planetary surface
exploration missions.
ROAMS provides a library of high fidelity models for the surface
rover. Its modular architecture permits the user to configure the
ROAMS can be used
in stand-alone mode or in closed-loop with onboard software.
ROAMS can also be embedded within a Matlab/Simulink
environment for use in analysis and algorithm development. During
mission operations, ROAMS can be used for sequence design and testing as
well as anomaly assessment. It also can
be used for Monte Carlo studies to generate performance statistics using
a variety of terrain environment models. Using the real-time features of
the underlying Darts/Dshell simulation toolkit, ROAMS can also be used
for real-time simulations.

[ MAIN | DARTS |DSHELL |ROAMS | DSENDS |SimScape |GNEIMO |Dspace |YaM |SOA |References |] 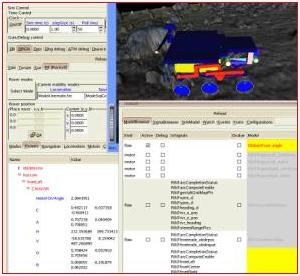 ROAMS provides a modular rover simulation framework to facilitate its use by
planetary exploration missions for system engineering studies,
technology development, and mission operation teams.
ROAMS is currently being developed and used by NASA's Mars Program as a
virtual testing ground for various rover subsystems and components.
ROAMS is a rover specific extension of the multi-mission
DARTS and DSHELL
spacecraft simulation toolkit which is capable of modeling vehicle dynamics,
engineering sensors and actuators, environments and is in use by several
interplanetary missions such as Cassini, SIM, DS-1, Mars Pathfinder etc.
ROAMS provides a modular rover simulation framework to facilitate its use by
planetary exploration missions for system engineering studies,
technology development, and mission operation teams.
ROAMS is currently being developed and used by NASA's Mars Program as a
virtual testing ground for various rover subsystems and components.
ROAMS is a rover specific extension of the multi-mission
DARTS and DSHELL
spacecraft simulation toolkit which is capable of modeling vehicle dynamics,
engineering sensors and actuators, environments and is in use by several
interplanetary missions such as Cassini, SIM, DS-1, Mars Pathfinder etc.
 simulation tailored to specific needs and fidelity. For instance
different rover vehicles, environments, navigation modes etc. can be
defined for setting up the simulation.
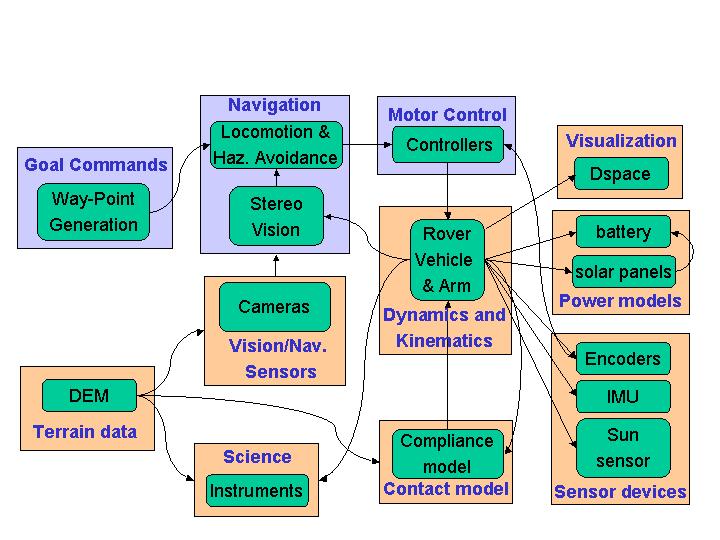
ROAMS' models
include the mechanical model of a rover, instrument arms, actuators and
sensors, power resource models, interactions with the terrain as well as
models for onboard software such as navigation and locomotion modules.
ROAMS includes models for the robotic vehicles kinematic and dynanmics
simulation tailored to specific needs and fidelity. For instance
different rover vehicles, environments, navigation modes etc. can be
defined for setting up the simulation.
ROAMS' models
include the mechanical model of a rover, instrument arms, actuators and
sensors, power resource models, interactions with the terrain as well as
models for onboard software such as navigation and locomotion modules.
ROAMS includes models for the robotic vehicles kinematic and dynanmics
 of the mechanical subsystem; sensor models such as sun sensors,
tilt sensors, clearance sensors; interactions with the terrain
environment; power resource models for solar panels and batteries; and
models for on-board navigation and locomotion control software.
of the mechanical subsystem; sensor models such as sun sensors,
tilt sensors, clearance sensors; interactions with the terrain
environment; power resource models for solar panels and batteries; and
models for on-board navigation and locomotion control software.
Additional information is available at the ROAMS Wiki.










