DSENDS is a high-fidelity spacecraft simulator for Entry, Descent
and Landing (EDL) on planetary and small-bodies. DSENDS (Dynamics
Simulator for Entry, Descent and Surface landing) is an EDL-specific
extension of a JPL multi-mission simulation toolkit Darts/Dshell which
is capable of modeling spacecraft dynamics, devices, and subsystems, and
is in use by interplanetary and science-craft missions such as Cassini,
Galileo, SIM, and Starlight. DSENDS is currently in use by the JPL Mars Science Laboratory project to provide a high-fidelity testbed for the test of
precision landing and hazard avoidance functions for future Mars
missions.
The software has core tool capabilities in dynamics, instrument/actuator
device models, and real-time simulation engineering. These allow the
modeling of the flighttrain elements during various phases of EDL and
all of the spacecraft responses.
Various EDL-specific aspects of the
simulator include the high-fidelity entry-body and parachute aerodynamic
models and supporting atmospheric models.
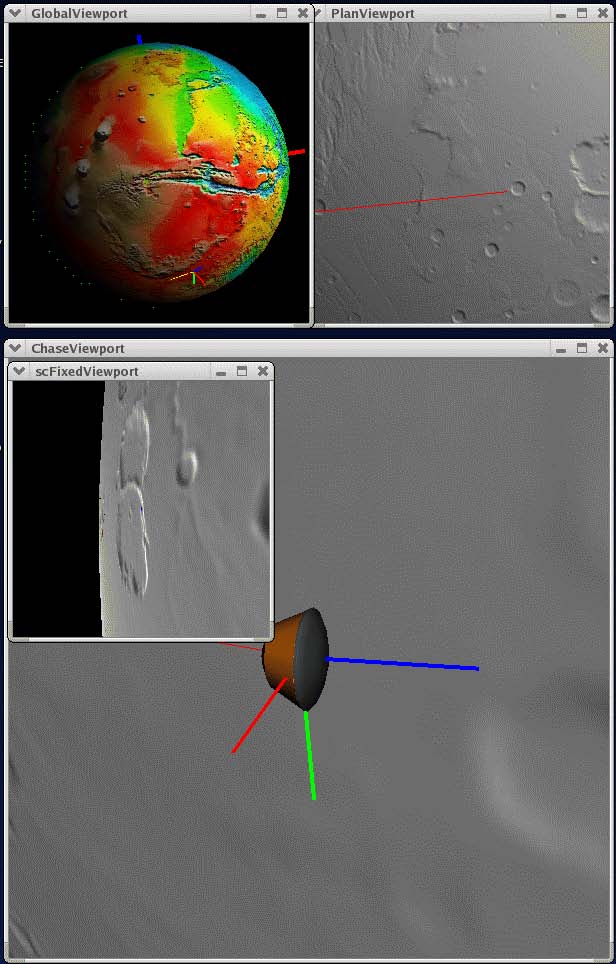
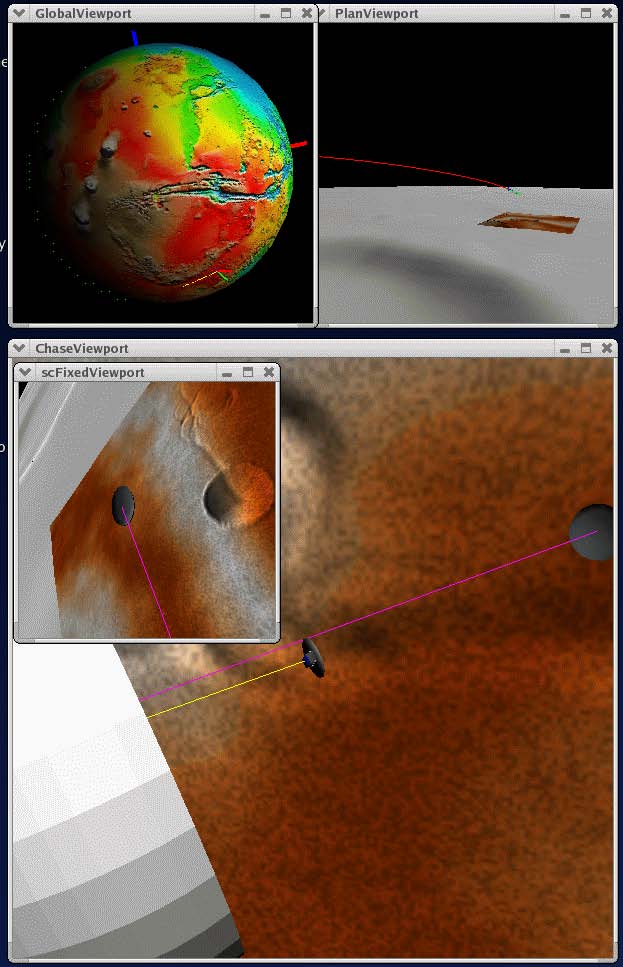
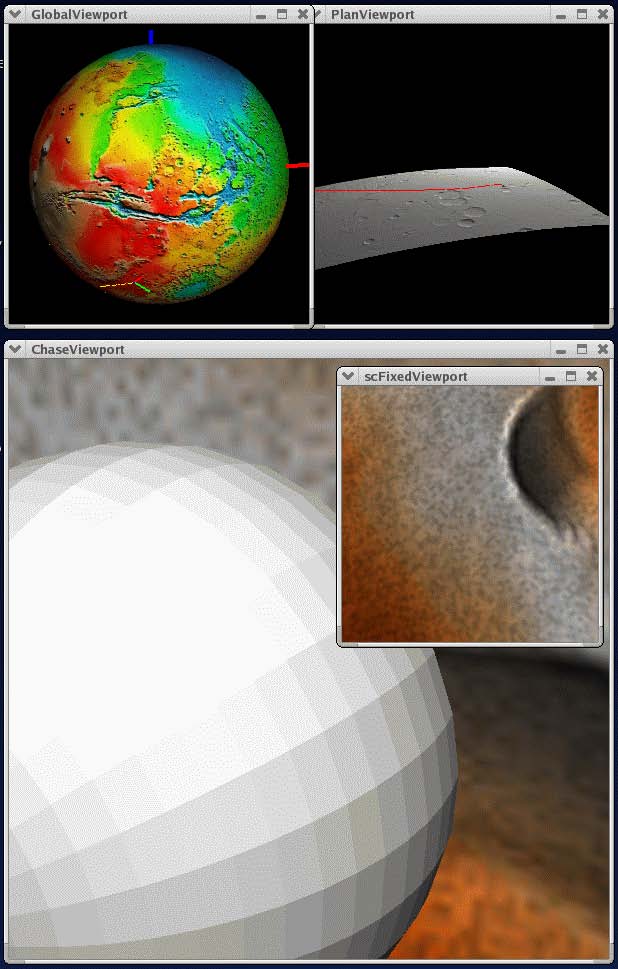
In addition the simulator
provides real-time terrain and instrument simulations for terrain
imaging lidars and radars.
The simulator hosts guidance/navigation
simulation modules for hypersonic steering and powered descent. Models
for landing kinematics and dynamics are being incorporated to determine
contact and impact forces. Automated statemachine driven model switching
is used to handle spacecraft separations and reconfigurations. Specific
visualization tools support EDL execution interpretation.
For planetary bodies, the EDL portion of these missions are vastly more
sophisticated than earlier and current missions which utilize relatively
straightforward ballistic entry methods with only mechanical hazard
accommodation capabilities. Precision landing is to be achieved using
lifting-body aero-maneuvering methods during the hypersonic atmospheric
entry phase to reduce the large landing dispersions associated with
ballistic atmospheric entry. Active landing and beacon sensors are being
contemplated for precision approach and hazard avoidance, with scanning
lidar and radar sensors actively used in closed-loop fashion to control
powered descent during the terminal phases of descent and landing.
All of these closed-loop control actions, together with the machine
intelligence algorithms used to select a safe landing site based upon
sensor data, are embedded into the on-board flight software and require
thorough verification at all stages of development. A high-fidelity
simulation, with the capability to realistically capture the relevant
physics and device interactions, can provide a level of verification and
validation of the algorithms, flight software, and embedded system
real-time performance.
For small-body missions, the EDL portion contemplates active hovering
and precision landing onto specific targets determined from earlier
mapping orbits. These capabilities depend on precision navigation in a
microgravity environment, active sensing to select viable landing sites,
together with control actions to overcome external disturbances in the
small-body proximity environment. Unlike a large planetary body,
atmospheric effects are fundamentally different, as comet out-gassing is
transitory rather than continuous. Descent and landing necessarily
includes orbital periods during which the gravity field of the body is
characterized, and a descent that is significantly slower than for
planetary bodies. Due to this, sequence timing is not as critical,
however an offsetting factor is the increase in uncertainty of
gravitational effects, and the increased requirements for autonomy due
to the typically large distances from Earth. From a simulation
perspective, highfidelity nonlinear gravity models, and the ability to
model a variety of spacecraft environment interactions are key to
verifying EDL performance.

[ MAIN | DARTS |DSHELL |ROAMS |DSENDS | SimScape |GNEIMO |Dspace |YaM |SOA |References |] 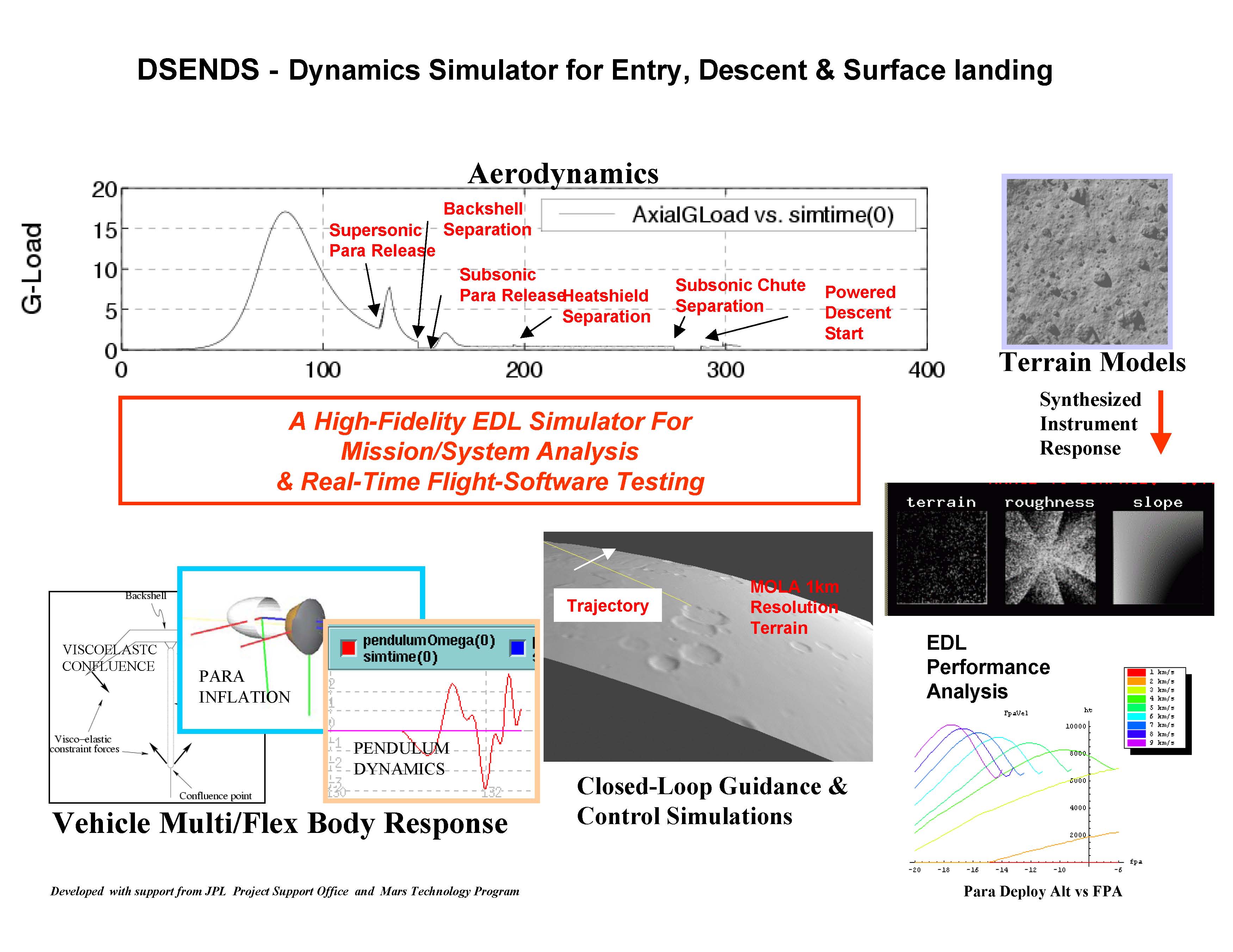
The DSENDS system is capable of supporting the entire mission lifecycle
use of simulators. This includes the facility to embed the simulator
into a Matlab/Simulink environment where control analysts can use the
same high-fidelity simulation us ed in real-time operations within a
familiar analysis environment. DSENDS also provides stand-alone
simulations to provide mission visualization and support for Monte-Carlo
analysis. Using the real-time features of the underlying Darts/Dshell
toolkit, DSENDS can be made to operate in a VxWorks/VxSim real-time
testbed.
Background
The National Aeronautics and Space Administration (NASA) plans to
conduct a series of challenging in-situ missions at a number of
planetary and small-bodies. These include a variety of Mars rover and
sample return missions, a Venus sample return mission, a Europa lander,
a Titan organics explorer, and a comet nucleus sample return mission.
These new missions are being conceived of as being more sophisticated in
their capabilities, especially with regard to their precision in landing
and their ability to handle a variety of landing hazards. A new
generation of high-fidelity simulators, especially with real-time
capability is required to deal with these new mission requirements.










