2023 JPL DARTS Lab Course
Aug 14-17, 2023
Course Information
After a break for the pandemic, we are pleased to announce the next JPL DARTS Lab course on the DARTS/DSHELL multi-mission vehicle dynamics simulation toolkit. This year's course will be held during August 14-17 on site at JPL, with an option to attend virtually as well.
The DARTS/DSHELL simulation framework is used to model the dynamics of mutliple degree of freedom (DOF) articulated space and robotics vehicles, environments, and autonomous platforms. This framework is the basis for domain-specific engineering simulators such as DSENDS for Entry, Descent and Landing (EDL) and ROAMS for ground vehicle applications. The course is oriented towards new and current users. The course will be held in two parts:
Part 1. DARTS/DSHELL Simulation Framework & Tools (Monday-Wednesday)
 This part of the course will
focus on the multi-mission DARTS/DSHELL simulation framework and
will cover key concepts and modules such as DARTS for dynamics
modeling, SimScape for terrain modeling, IRIS and Dspace for
sensor modeling and 3D
visualization, component data flow DSHELL models and sub-system
assemblies, along with the large library of component models for
terramechanics, aerodynamics, cameras, high-order gravitational
fields, inertial sensors, propulsion systems, rigid/flex body dynamics
etc.
This part of the course will
focus on the multi-mission DARTS/DSHELL simulation framework and
will cover key concepts and modules such as DARTS for dynamics
modeling, SimScape for terrain modeling, IRIS and Dspace for
sensor modeling and 3D
visualization, component data flow DSHELL models and sub-system
assemblies, along with the large library of component models for
terramechanics, aerodynamics, cameras, high-order gravitational
fields, inertial sensors, propulsion systems, rigid/flex body dynamics
etc.
Part 2. Flexible Multibody Dynamics Modeling & Tools (Thursday)
This will be a special topics part of the course focusing on the use of the DARTS/DSHELL framework for developing flexible body dynamics models for guidance and control (G&C) use. The course will cover the use of the FModal tool based pipeline for processing structural dynamics Finite Element Model (FEM) data, carrying out modal analysis to generate reduced order models, developing flexible multibody models for nonlinear time-domain simulations, and generation of linearized models for aero/servo-elastic G&C analysis.
Basic familiarity with the Python language and kinematics of robotic/physical systems is desirable. Interactive Jupyter notebooks will be used throughout the course for illustration and hands on familiarization with the DARTS/DSHELL simulation software. The course will only include EAR99 content, and is open to non-US and non-JPL persons. There is no fee for the course.
Course Logistics
Please fill out and submit the registration form if you are interested and we will also add you to the course mailing list. This course will be virtual via WebeX for remote attendance. Please email dartslab.courseadmin@jpl.nasa.gov if you have any questions regarding the course. There is no fee to attend the course.
We appreciate your help in spreading the word to colleagues and others who might be interested in this course.
JPL DARTS Lab Background
 The DARTS/DSHELL framework is the basis for multiple domain specific engineering simulators such as
The DARTS/DSHELL framework is the basis for multiple domain specific engineering simulators such as
- DSENDS for Entry/Descent/Landing systems: DSENDS is used for trajectory analysis, uncertainty quantification and sensitivity analyses for autonomous landing critical events. Usage includes EDL and flight dynamics simulations for Mars Sample Return, Mars 2020, InSight, Mars Helicopter, MSL, Europa Lander, mission formulation/proposal tasks, and advanced study tasks for Mars, Venus, Titan, Small Bodies, Earth Re-entry capsules, and the Moon, LDSD/ASPIRE and Mars Ascent Vehicle. DSHELL has is also in use for the simulation of ISS, SLS/Orion and other human exploration projects.
- ROAMS for ground vehicles: ROAMS is used for modeling Mars autonomous and semi-autonomous planetary rovers, mobile robotic platforms and vehicles for lunar surface operations, and for ocean world robotics exploration applications. ROAMS also models vehicles such as HMMWV and Polaris for terrestrial applications.
- RoboDarts for robotics. RoboDarts is focused on the modeling of multi-limb robotic manipulation and legged platforms. Beyond simulation applications, RoboDarts models are also suitable for embedded use for whole-body motion robot control applications.
- Other: Parts of this toolkit have also been adapted to develop the GNEIMO software for the simulation of bio-molecular systems.
More information on the JPL DARTS Lab and publications can be found at http://dartslab.jpl.nasa.gov.
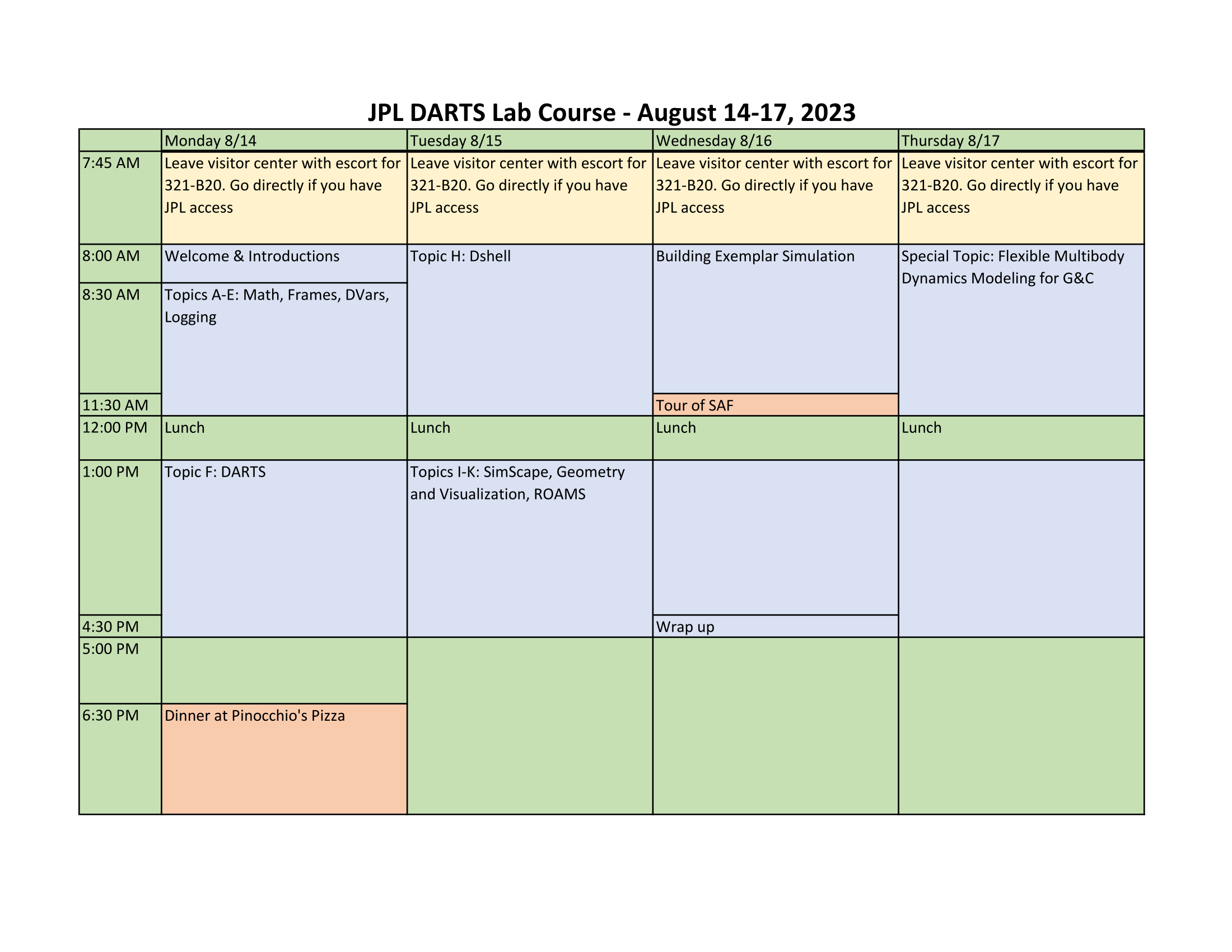
Preliminary Schedule and Topics for the 2023 Course
The current schedule of course topics is shown below (click to access a PDF version):
Contact info
Abhi Jain (jain@jpl.nasa.gov)
Carl Leake (leake@jpl.nasa.gov)